
自動運転社会実装を見据えたリスクアセスメントモデル「運用プロセスアセスメント汎用モデル」【RMFOCUS 第97号】
 RM NAVI会員(登録無料)のみ全文閲覧できます
RM NAVI会員(登録無料)のみ全文閲覧できます
[このレポートを書いたコンサルタント]
- 会社名
- MS&ADインターリスク総研株式会社
- 部署名
- リスクコンサルティング本部 リスクマネジメント第二部
次世代モビリティグループ - 執筆者名
- マネジャー上席コンサルタント 大島 伸二 Shinji Oshima
2026.4.2
- 自動運転車を用いた公共交通サービスの実証実験は、より社会実装が近い事業モデルが期待されている。
- 実証実験において行われてきたリスクアセスメントは、走行予定ル-ト上の安全を担保するための技術検討を目的としたリスクアセスメントである。一方、社会実装時に想定される運賃収受時のトラブルや遠隔監視者の体調不良による代替要員の手配など技術以外に着目したリスクアセスメントは多くの地域で着手されていない。
- 2025年にMS&ADインターリスク総研は社会実装時に想定されるリスク事象に対応し、自動運転車を用いた公共交通サービス事業に携わる関係者が自ら取り組むことができる「運用プロセスアセスメント汎用モデル」を新たに追加した。その概要について解説する。
1. 自動運転車を用いた公共交通サービスの現状
自動運転は大きく自家用自動車(オーナーカー)の自動運転と自動運転車を用いた公共交通サービスの自動運転に分けられる。自家用自動車の自動運転については、自動車メーカーによる広告等を通じて技術向上の取り組みが伝えられることが多い。一方で、自動運転車を用いた公共交通サービスについては、自動運転バスの実証実験等に関する報道を通じて知る機会が多く、地域によっては身近に感じられない場合もあると考えられる。
本稿では、後者の自動運転車を用いた公共交通サービスを対象としてMS&ADインターリスク総研が開発・追加したリスクアセスメントモデルを解説する。なお、本稿における自動運転とは、自動運転レベル5段階のうち限定条件下での完全自動運転であるレベル4 (L4) 1)を指す。
2022年に閣議決定された「デジタル田園都市国家構想総合戦略」2)では、地域交通のリ・デザイン方策の一つとして「地域限定型の無人自動移動サービスを2025年度をめどに50箇所程度、2027年度までに100箇所以上で実現」することが打ち出された。この閣議決定を受け、運転士不足、過疎対策といった社会課題の解決を目的として自動運転車を用いた公共交通サービスの実証実験が多くの自治体で行われた。
実証実験への取り組みにあたり、政府補助金が主な役割を果たしてきたが、なかでも国土交通省による地域公共交通確保維持改善事業費補助金(以下、「本補助金」)3)は表1のとおり、多くの自治体が利用した。
実証実験の取り組みが進むにつれ、2027年度での自動運転車を用いた公共交通サービスの実現が見込めない自治体の本補助金申請や、財務省による本補助金の費用対効果検証 4)などを受け、本補助金申請時の方針徹底が行われた。まず、2025年度本補助金申請では早期に成果が見込まれるプロジェクトを補助対象とする旨が明記された 5)。また、2026年度本補助金申請においては、「2027年度までに計画した全ルートにおいて自動運転レベル4での走行が求められ、目標が未達成となった場合、補助金の一部を返還」6)との文言が追加された。
【表1】国土交通省 地域公共交通確保維持改善事業費補助金の採択状況
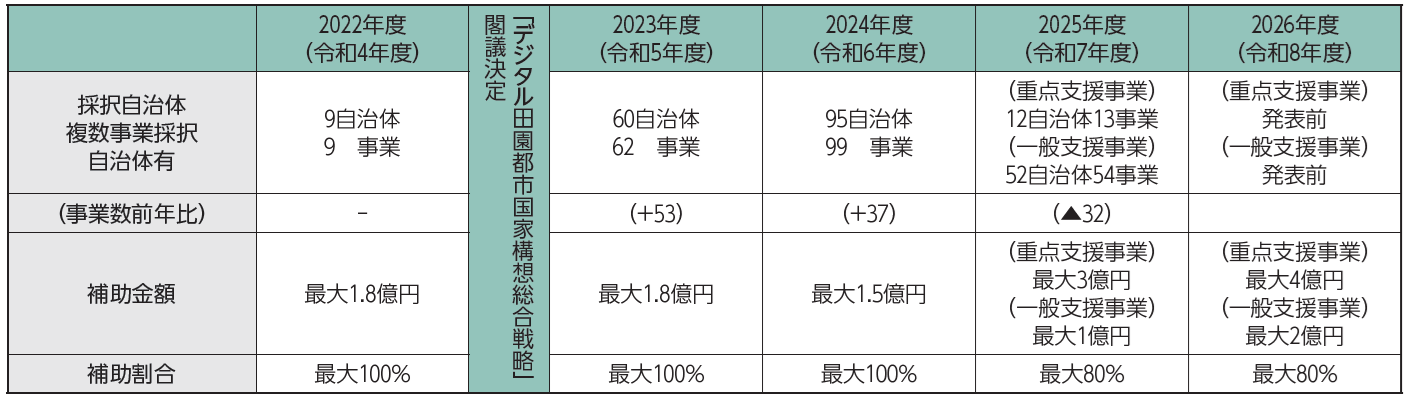
このように政府が期待する自動運転車を用いた公共交通サービスは、「社会実験的な取り組み」から「社会実装を前提とした取り組み」であることが明確になり、実証実験継続を断念する自治体、補助金申請を行ったものの交付が認められない自治体が増えた。
2. リスクアセスメントの課題とMS&ADインターリスク総研の取り組み
自動運転車を用いた公共交通サービス導入に向けた取り組みとして、リスクアセスメントの実施がある。リスクアセスメントとは、潜在的なリスクを特定、評価し、リスクを低減するための一連の手法である。過去、自動運転車を用いた公共交通サービスの実証実験において行われてきたリスクアセスメントは、自動運転車の走行予定ル-トを対象に、安全に走行するための技術対策を中心としていた。例えば、
- 「走行予定ル-トのA地点は登下校経路にあり子供が飛び出してくる可能性があるため減速走行する」
- 「走行予定ル-トのB地点付近は周囲を走行する自動車の速度が速いため、被追突回避を目的に後方から近づいてくる車両に向け、車間距離の確保を促すサイネージを自動運転車両後部に設置する」
といったものである。
これらは、過去の事故データの分析や現地調査などの手法で実施されることが一般的である。しかし、自動運転車を用いた公共交通サービスの社会実装には、安全に走行することはもとより、従来の手動運転同様の円滑な運行サービスの提供も求められている。例えば、
- 「無人車両のお釣り対応など運賃収受時のトラブルにどう対応するか」
- 「車いす利用者の乗車をどうサポートするか」
といった自動運転車を用いた公共交通サービス特有のリスク事象も想定される。しかし、これらに対するリスクアセスメントは、多くの実証実験でまだ実施されていない。
MS&ADインターリスク総研では、2021年より自動運転車を用いた公共交通サービスの社会実装に向け、主に技術以外の点でどのようなリスク事象が発生しうるか、またそのリスクに対してどのように対策を検討するかについて調査・研究を行ってきた 7)。本研究においては、プロセスを軸として分析を進めてきた。プロセスとは一般的に「物事を進める手順」「物事が進む過程」と解されているが、MS&ADインターリスク総研では、そのプロセスのうち、自動運転サービスを実際に運用(稼働)させるために必要な手順や活動を運用上のプロセス(以下、「運用プロセス」)として抽出した。
具体的には、一日のフローを「運行前に行うこと」「運行時に行うこと」などに区分し、各区分において想定される運用プロセス(例:運行管理、遠隔監視、乗客対応、車両メンテナンスなど)の整理を行う。整理した運用プロセスのうち例えば「料金収納」では「お釣りトラブル」というリスク事象を発生させうるため、該当プロセスに対して対策を検討するイメージである。
運用プロセスに関するリスクアセスメント(以下、「運用プロセスアセスメント」)を行う目的は主として、安定したサービス提供やリスク事象の優先順位付けのみならず、リスクの低減、業務効率化、法令遵守、品質向上などを実現することである。 特に、自動運転を取り巻く技術や法整備が目まぐるしく変化・進展する中、現行の手動運転による公共交通サービスと同様の安定したサービス提供を目指すこと、さらに「ゲリラ豪雨による運行停止」や「無人運行中の乗客トラブル」など自動運転車特有のリスク事象とその被害程度について事前に評価(スコアリング)し、対策の取組優先度を決定することが重要である。また、マンパワーや費用制約、リスク管理、事業継続の観点からも優先順位付けは必要な手続きであり、限られたリソースの中で最も重要な対策を効率的に実施することが求められる。このように、運用プロセスを網羅的に整理し、プロセスごとにリスク事象を特定・評価することが運用プロセスアセスメントのアプローチである。
3. 運用プロセスアセスメント汎用モデルの取り組み
2025年、運用プロセスアセスメントについて、自動運転車を用いた公共交通サービス事業に携わる関係者(以下、「事業関係者」)が自ら実施できるよう汎用モデルの追加を行った。
MS&ADインターリスク総研が過去に関与してきた運用プロセスアセスメントにおいて、把握した課題の解決策として開発したものである・・・
ここまでお読みいただきありがとうございます。
以下のボタンをクリックしていただくとPDFにて全文をお読みいただけます(無料の会員登録が必要です)。
会員登録してPDFで全て読む

ご登録済みの方は
79117文字